在做毕设过程中,用到了八个相同的传感器,传感器的通信协议都是一样的,固然直接搞八个差不多的文件来驱动传感器是没问题的,但是有一种更简洁的方式,那就是使用C++,来复用通信程序;
参考:https://zhuanlan.zhihu.com/p/115068898
环境说明
使用的单片机芯片是STM32F103C6T6;
Keil编译器版本为AC6;
Keil的配置如下:
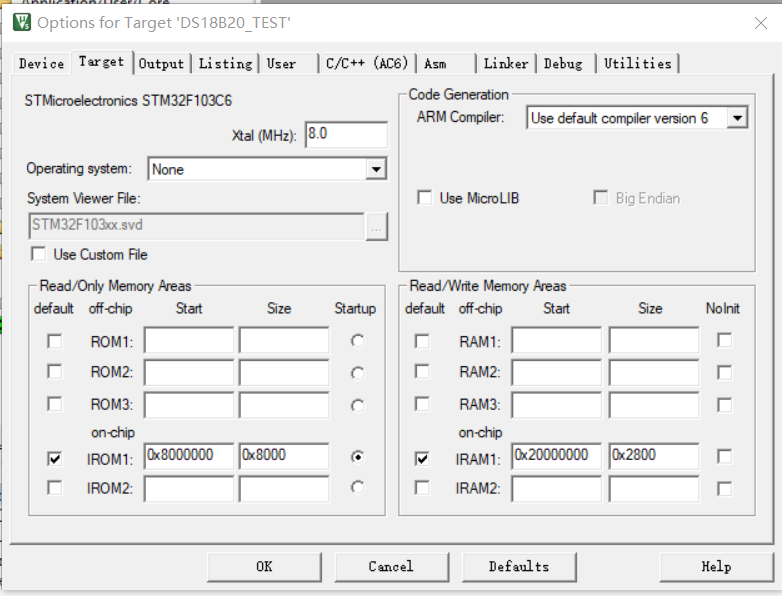
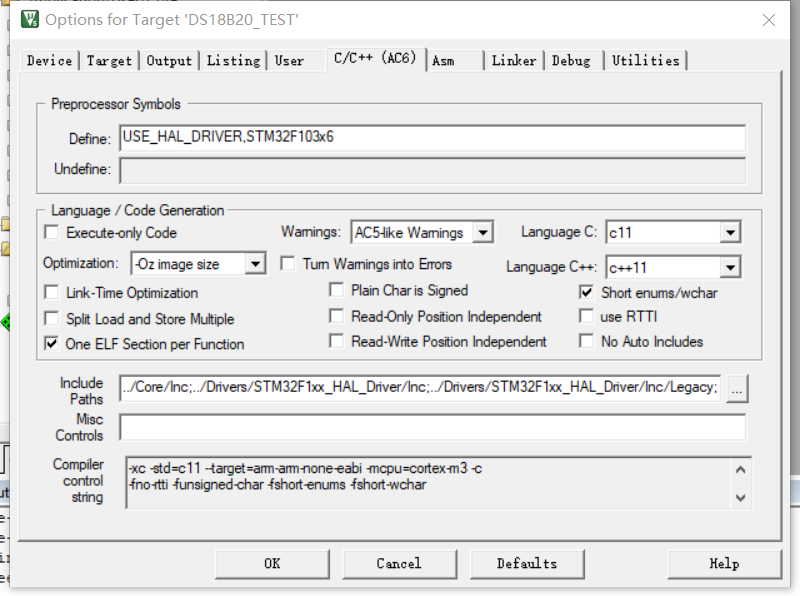
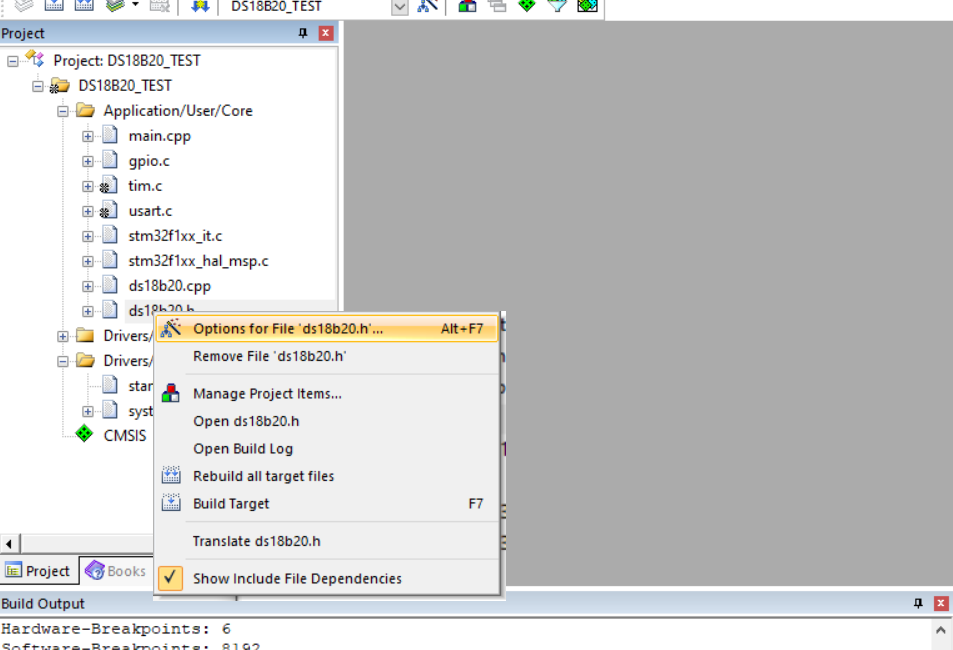
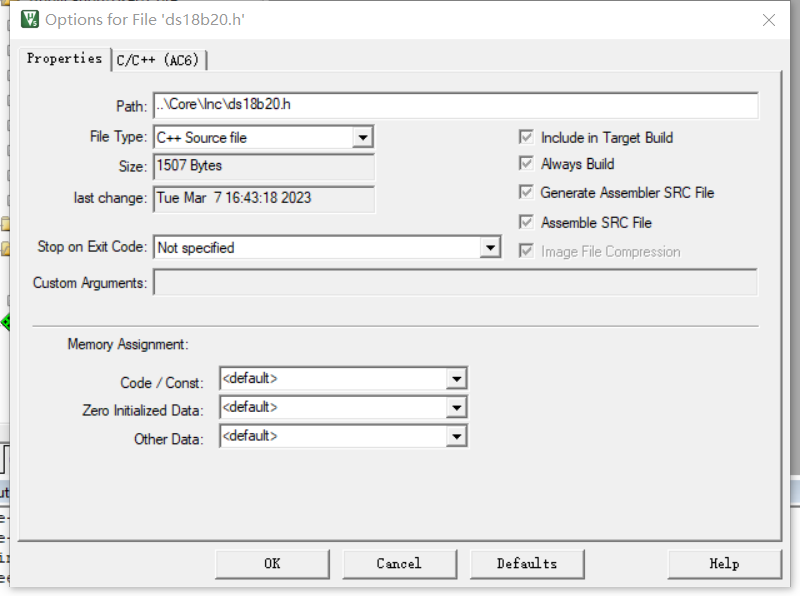
然后是将C++源文件配对的头文件改为使用C++编译器进行编译;
源码编写
注意把main文件的后缀也改为.cpp,否则会出错;
头文件:
/*
* @Author : fan-pengfei 2253770787@qq.com
* @Date : 2023-03-07 13:43:38
* @LastEditors : fan-pengfei 2253770787@qq.com
* @LastEditTime : 2023-03-07 14:41:29
* @FilePath : \Core\Inc\ds18b20.h
* @Description :
* Copyright (c) 2023 by ${git_name_email}, All Rights Reserved.
*/
#ifndef __DS18B20_H
#define __DS18B20_H
#include "main.h"
#include "tim.h"
class DS18B20_Class
{
private:
GPIO_TypeDef *BSP_DS18B20_PORT;
uint16_t BSP_DS18B20_PIN;
float *Temp_Sum;
uint8_t LOCATION;
public:
DS18B20_Class(GPIO_TypeDef *BSP_DS18B20_PORT, uint16_t BSP_DS18B20_PIN, uint8_t LOCATION, float *Temp_data);
void delay_us(uint16_t us);
GPIO_PinState DS18B20_IN(void);
void DS18B20_OUT_1(void);
void DS18B20_OUT_0(void);
void DS18B20_Mode_OUT_PP(void);
void DS18B20_Mode_IN_NP(void);
void DS18B20_Reset(void);
uint8_t DS18B20_Presence(void);
uint8_t DS18B20_ReadBit(void);
uint8_t DS18B20_ReadByte(void);
void DS18B20_WriteByte(uint8_t dat);
void DS18B20_ReadId(uint8_t *ds18b20_id);
void DS18B20_SkipRom(void);
void DS18B20_MatchRom(void);
uint8_t Init(void);
float DS18B20_GetTemp_SkipRom(void);
float DS18B20_GetTemp_MatchRom(uint8_t *ds18b20_id);
void Start_Convert(void);
void Get_Data(uint8_t ds18b20_id[64][8]);
};
extern "C"
{
void User_DS18B20_Init(void);
void User_Start_Convert(void);
void User_Get_Data(void);
}
#endif
源文件:
/*
* @Author : fan-pengfei 2253770787@qq.com
* @Date : 2023-03-07 13:43:26
* @LastEditors : fan-pengfei 2253770787@qq.com
* @LastEditTime : 2023-03-07 16:41:42
* @FilePath : \Core\Src\ds18b20.cpp
* @Description :
* Copyright (c) 2023 by ${git_name_email}, All Rights Reserved.
*/
#include "ds18b20.h"
#include "main.h"
#include "DS18B20_ID.h"
extern float Temp_Sum[64];
void DS18B20_Class::delay_us(uint16_t us)
{
tim_delay_us(us);
// uint32_t delay;
// delay = (1600 * us);
// while (delay--)
// {
// }
}
GPIO_PinState DS18B20_Class::DS18B20_IN(void)
{
return HAL_GPIO_ReadPin(BSP_DS18B20_PORT, BSP_DS18B20_PIN);
}
void DS18B20_Class::DS18B20_OUT_1(void)
{
HAL_GPIO_WritePin(BSP_DS18B20_PORT, BSP_DS18B20_PIN, GPIO_PIN_SET);
}
void DS18B20_Class::DS18B20_OUT_0(void)
{
HAL_GPIO_WritePin(BSP_DS18B20_PORT, BSP_DS18B20_PIN, GPIO_PIN_RESET);
}
/**
* @brief DS18B20 输出模式
*/
void DS18B20_Class::DS18B20_Mode_OUT_PP(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = BSP_DS18B20_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(BSP_DS18B20_PORT, &GPIO_InitStruct);
}
/**
* @brief DS18B20 输入模式
*/
void DS18B20_Class::DS18B20_Mode_IN_NP(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.Pin = BSP_DS18B20_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(BSP_DS18B20_PORT, &GPIO_InitStruct);
}
/**
* @brief 主机给从机发送复位脉冲
*/
void DS18B20_Class::DS18B20_Reset(void)
{
DS18B20_Mode_OUT_PP(); // 主机输出
DS18B20_OUT_0(); // 主机至少产生 480us 的低电平复位信号
delay_us(750);
DS18B20_OUT_1(); // 主机在产生复位信号后,需将总线拉高
// 从机接收到主机的复位信号后,会在 15 ~ 60 us 后给主机发一个存在脉冲
delay_us(15);
}
/**
* @brief 检测从机给主机返回的存在脉冲
* @return 0:成功 1:失败
*/
uint8_t DS18B20_Class::DS18B20_Presence(void)
{
uint8_t pulse_time = 0;
DS18B20_Mode_IN_NP(); // 主机设为输入
while (DS18B20_IN() && (pulse_time = 100)
{
return 1;
}
else
{
pulse_time = 0;
}
while (!(DS18B20_IN()) && pulse_time = 240)
{
return 1;
}
else
{
return 0;
}
}
/**
* @brief 从DS18B20读取一个bit
*/
uint8_t DS18B20_Class::DS18B20_ReadBit(void)
{
uint8_t dat;
DS18B20_Mode_OUT_PP(); // 读 0 和读 1 的时间至少要大于 60 us
DS18B20_OUT_0(); // 读时间的起始:必须由主机产生 > 1us > 1;
// 写 0 和写 1 的时间至少要大于60us
if (testb) // 当前位写 1
{
DS18B20_OUT_0();
delay_us(5); // 拉低发送写时段信号
DS18B20_OUT_1(); // 读取电平时间保持高电平
delay_us(65);
}
else // 当前位写 0
{
DS18B20_OUT_0(); // 拉低发送写时段信号
delay_us(70); // 读取电平时间保持低电平
DS18B20_OUT_1();
delay_us(2); // 恢复时间
}
}
}
/**
* @brief 跳过匹配 DS18B20 ROM
*/
void DS18B20_Class::DS18B20_SkipRom(void)
{
DS18B20_Reset();
DS18B20_Presence();
DS18B20_WriteByte(0XCC); /* 跳过 ROM */
}
/**
* @brief 执行匹配 DS18B20 ROM
*/
void DS18B20_Class::DS18B20_MatchRom(void)
{
DS18B20_Reset();
DS18B20_Presence();
DS18B20_WriteByte(0X55); /* 匹配 ROM */
}
DS18B20_Class::DS18B20_Class(GPIO_TypeDef *BSP_DS18B20_PORT, uint16_t BSP_DS18B20_PIN, uint8_t LOCATION, float *Temp_data)
{
DS18B20_Class::BSP_DS18B20_PORT = BSP_DS18B20_PORT;
DS18B20_Class::BSP_DS18B20_PIN = BSP_DS18B20_PIN;
DS18B20_Class::LOCATION = LOCATION;
DS18B20_Class::Temp_Sum = Temp_data;
}
uint8_t DS18B20_Class::Init(void)
{
DS18B20_Mode_OUT_PP();
DS18B20_OUT_1();
DS18B20_Reset();
return DS18B20_Presence();
}
/**
* 存储的温度是16 位的带符号扩展的二进制补码形式
* 当工作在12位分辨率时,其中5个符号位,7个整数位,4个小数位
*
* |---------整数----------|-----小数 分辨率 1/(2^4)=0.0625----|
* 低字节 | 2^3 | 2^2 | 2^1 | 2^0 | 2^(-1) | 2^(-2) | 2^(-3) | 2^(-4) |
*
*
* |-----符号位:0->正 1->负-------|-----------整数-----------|
* 高字节 | s | s | s | s | s | 2^6 | 2^5 | 2^4 |
*
*
* 温度 = 符号位 + 整数 + 小数*0.0625
*/
/**
* @brief 在跳过匹配 ROM 情况下获取 DS18B20 温度值
* @param 无
* @retval 温度值
*/
float DS18B20_Class::DS18B20_GetTemp_SkipRom(void)
{
uint8_t tpmsb, tplsb;
int16_t s_tem;
float f_tem;
DS18B20_SkipRom();
DS18B20_WriteByte(0X44); /* 开始转换 */
DS18B20_SkipRom();
DS18B20_WriteByte(0XBE); /* 读温度值 */
tplsb = DS18B20_ReadByte();
tpmsb = DS18B20_ReadByte();
s_tem = tpmsb 要注意其中的`extern "C"`的用法;
### Main中调用:
> 注意main文件也是cpp后缀;
```c++
void main(void)
{
User_DS18B20_Init();
while (1)
{
User_Start_Convert();
HAL_Delay(200); // 更新速率为200ms,等待转换结束
User_Get_Data();
int i = 0;
while (i
使用C编写

使用C++编写

**C:**
Total RO Size (Code + RO Data)
14016 (13.69kB)
Total RW Size (RW Data + ZI Data)
2040 (1.99kB)
Total ROM Size (Code + RO Data + RW Data)
14464 ( 14.13kB)
**C++:**
Total RO Size (Code + RO Data)
11780 (11.50kB)
Total RW Size (RW Data + ZI Data)
2864 (2.80kB)
Total ROM Size (Code + RO Data + RW Data)
12220 ( 11.93kB)
> 相比较而言C用的ROM比较多一些,C++用的RAM比较多一些;
**可见在某些情况下,使用C++编写代码可以有效缩减代码体积,且代码更易懂;**
### microlib
使用C++编译的话,就没法再使用MicroLIB,因为MicroLIB为非标准的精简库,会与标准C++产生冲突;
### 中断服务程序
如果中断服务程序是异常的,因为stm32的中断入口矢量是按C的方式进入的,因此需要在整个文档的头部和末尾加上extern “C”{}用大括号把整个代码段扩住,这样中断就可以正常的进入了;
### Cubemx
Cubemx在生成头文件中已经加入了:
```c
#ifdef __cplusplus
extern "C" {
#endif
#ifdef __cplusplus
}
#endif
所以在不是其生成的文件中要注意extern "C"的使用;
当需要使用有C++特性的头文档时可以直接用cpp后缀,没有用到C++特性的可以C后缀也可以以CPP后缀了;
printf的实现
半主机模式是ARM的一种机制,实现将来ARM应用程序代码的输入/输出请求传送至运行着调试器的主机。例如设置使用半主机模式下的ARM应用程序,可以使用printf()和scanf()来使用主机的显示器和键盘,而不需要在ARM系统上搭配显示器和键盘。 半主机通过一组定义好的软件指令(如SVC)来实现的,这些指令在程序控制下产生异常,ARM应用程序调用半主机对应的异常处理函数,然后调试代理处理该异常。
第二段话感觉理解起来有点模糊,但是第一段还是懂它在讲什么的。一般的ARM应用程序中并不需要半主机操作,在这里为确保ARM应用程序中没有链接MicroLib的半主机相关函数,我们要取消ARM的半主机工作模式。
实现代码:
在工程中加上如下代码:
// 取消ARM的半主机工作模式
__asm(".global __use_no_semihosting"); // 用于AC6编译器
// #pragma import(__use_no_semihosting)//用于AC5编译器
FILE __stdout;
void _sys_exit(int x)
{
x = x;
}
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xFFFF);
return ch;
}
然后就可以愉快的使用printf打印日志了;