用Markdown编辑数学公式看起来会很舒服,学一下;
希腊字母:
常见希腊字母:
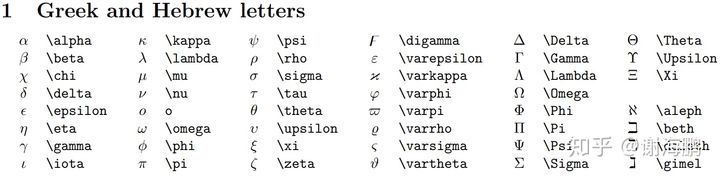
$\alpha$、$\beta$、$\chi$、$\Delta$、$\Gamma$、$\Theta$
$$
\alpha\beta\chi
$$
显示效果为:
\alpha\beta\chi\Delta\Gamma\Theta
注:当希腊字母的LaTex语法首字母大写时,即输出大写的希腊字母;首字母小写时,输出小写的希腊字母。
数学结构:

分数:
$\frac{abc}{xyz}$
显示效果为:
\frac{abc}{xyz}
根号:
$$
\frac{\sqrt{1+abc}}{\sqrt{1-abc}}
$$
显示效果为:
\frac{\sqrt{1+abc}}{\sqrt{1-abc}}
向量符号:

$\overrightarrow{F}$
显示效果为:
\overrightarrow{F}
定界符:

$|$、$\|$、$\Uparrow$
显示效果为:
|、|、\Uparrow
注:将上述定界符与
\left和right组合使用可以使得定界符匹配其内容的高度。
比如要构建一个如下的矩阵的行列式。
$$
\left|\begin{matrix}
1 & 2 & 3 \\
4 & 5 & 6 \\
7 & 8 & 9
\end{matrix} \right|
$$
显示效果如下:
\left|\begin{matrix} 1 & 2 & 3 \ 4 & 5 & 6 \ 7 & 8 & 9 \end{matrix} \right|
可变大小的符号

$\sum$、$\int$、$\oint$、$\iint$
$$
\bigcap\bigcup\bigoplus\bigotimes
$$
显示效果如下:
\sum\int\oint\iint\bigcap\bigcup\bigoplus\bigotimes
函数名称:
$\sin$、$\cos$、$\tan$、$\log$
$$
\tan(at-n\pi)
$$
显示效果如下:
\tan(at-n\pi)
二进制运算符和关系运算符
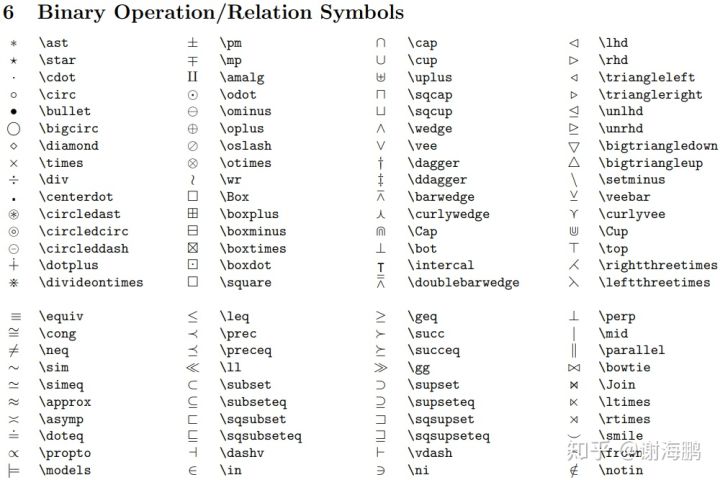
$\times$、$\ast$、$\div$、$\pm$、$\mp$、$\leq$、$\geq$、$\lessgtr$
显示效果如下:
\times\ast\div\pm\mp\leq\geq\lessgtr
上下标
在符号的后面打下划线_,那么下划线后面的符号就自动放在了下标的位置;
上标就是次方符号^;
如果要同时打出上下标,直接连续输入即可。并且上、下标的输入顺序是无所谓的;
如果上下标的内容由多个字符组成,那么就必须要加上花括号。这是因为上下标符号后面只默认第一个字符为上下标内容;
左边的上下标,直接把上下标的内容左边即可;
举例:
T^t
T_t
T_t^r
T_{tt}
T^t T_t T_t^r T_{tt}
其他例子
由以下公式:
^{i-1}iT=Rot(x,\alpha{i-1})*Trans(\alpha_{i-1},0,0)*Rot(z,\theta_i)*Trans(0,0,d_i) ^{i-1}_iT= \left [\begin{array}{c} cos\theta_i &-sin\theta_icos\alpha_i &sin\theta_isin\alpha_i &\alpha_icos\theta_i \ sin\theta_i &cos\theta_isin\alpha_i &-cos\theta_isin\alpha_i &\alpha_isin\theta_i \ 0 &sin\alpha_i &cos\alpha_i &d_i \ 0 &0 &0 &1 \end{array}\right] 可以得到^0_1T、^1_2T、^2_3T、^3_4T、^4_5T、^5_6T的计算公式;
然后由公式:
^0_6T=^0_1T*^1_2T*^2_3T*^3_4T*^4_5T*^5_6T= \left [\begin{array}{c} n_x &o_x &a_x &p_x \ n_y &o_y &a_y &p_y\ n_z &o_z &a_z &p_z\ 0 &0 &0 &1 \end{array}\right] 可以计算得出^0_6T的值即可;
使用MATLAB计算得到的结果为:
^0_6T= \left [\begin{array}{r} 0.000 &-1.000 &0.000 &0.1639 \ 1.000 &-1.000 &0.000 &-0.7277\ 0.000 &1.000 &0.000 &-0.3529\ 0.000 &0.000 &0.000 &1.0000 \end{array}\right] 从末端姿态矩阵^0_6T可以知道机器人的末端位置分量:
(p_x,p_y,p_z)=(0.1639,-0.7277,-0.3529) 按照关节角度[90°, 0°, 90°, 180°, 90°, 90°]来控制仿真程序中机器人得到的仿真结果如下图所示: