PID控制中常出现的积分饱和概念及其解决方案;
积分饱和的概念:
这种现象往往发生在误差有大幅变化(例如大幅增加),积分器因为误差的大幅增加有很大的累计量,因为积分器的输出满足下式:
离散化形式表示为:
所以随着时间的增加,每次累积较大的误差,很容易造成积分饱和并产生较大的过冲,而且当误差变为负时,其过冲仍维持一段时间之后才恢复正常的情形。
通常会产生的输出如下图所示:
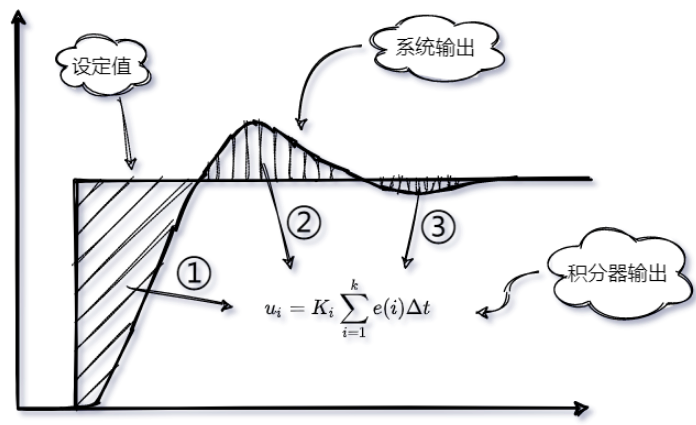
从图中我们不难发现,这里有三个过程:
因为这个过程存在 较大幅度变化的误差,因此积分器累积了较大的值,从图中可以看到,积分器的面积比较大(阴影部分);
此时积分已经饱和,产生了较大的过冲,并且在较长的一段时间内,一直处于过冲的状态;
积分脱离饱和状态,产生了积极的调节作用,消除静差,系统输出达到设定值;
如何防止积分饱和:
为了防止PID控制器出现积分饱和,需要在算法加入抗积分饱和(anti-integral windup)的算法;通常有以下几种措施;
积分分离或者称为去积分算法;
在饱和的时候将积分器的累计值初始化到一个比较理想的值;
若积分饱和因为目标值突然变化而产生,将目标值以适当斜率的斜坡变化可避免此情形;
将积分累计量限制上下限,避免积分累计量超过限制值;
如果 PID输出已经饱和,则重新计算积分累计量,使输出恰好为合理的范围;