STM32启动代码原理分析(底层技术);
简述
ARM Cortex-M系列MCU的启动代码(使用汇编语言编程则不需要)主要做3件事情:
初始化并正确放置异常/中断矢量表;
分散加载;
初始化C语言运行环境(初始化堆栈以及C Library、浮点等)。
Cortex-M3内核规定,起始地址必须存放堆顶指针,而第二个地址则必须存放复位中断入口矢量地址,这样在Cortex-M3内核复位后,会自动从起始地址的下一个32位空间取出复位中断入口矢量,跳转执行复位中断服务程序。对比ARM7/ARM9内核,Cortex-M3内核则是固定了中断矢量表的位置而起始地址是可变化的。
源码分析
基于STM32F103C6T6的启动文件startup_stm32f103x6.s的简要说明如下:
;******************** (C) COPYRIGHT 2017 STMicroelectronics ********************
;* File Name : startup_stm32f103x6.s
;* Author : MCD Application Team
;* Description : STM32F103x6 Devices vector table for MDK-ARM toolchain.
;* This module performs:
;* - Set the initial SP
;* - Set the initial PC == Reset_Handler
;* - Set the vector table entries with the exceptions ISR address
;* - Configure the clock system
;* - Branches to __main in the C library (which eventually
;* calls main()).
;* After Reset the Cortex-M3 processor is in Thread mode,
;* priority is Privileged, and the Stack is set to Main.
;******************************************************************************
;* @attention
;*
;* Copyright (c) 2017 STMicroelectronics.
;* All rights reserved.
;*
;* This software component is licensed by ST under BSD 3-Clause license,
;* the "License"; You may not use this file except in compliance with the
;* License. You may obtain a copy of the License at:
;* opensource.org/licenses/BSD-3-Clause
;*
;******************************************************************************
; Amount of memory (in bytes) allocated for Stack
; Tailor this value to your application needs
; Stack Configuration
; Stack Size (in Bytes)
;
Stack_Size EQU 0x400 ;声明栈的大小为0x400字节
AREA STACK, NOINIT, READWRITE, ALIGN=3
Stack_Mem SPACE Stack_Size ;开辟一段大小为Stack_Size的内存空间作为栈
__initial_sp ;标号__initial_sp,表示栈空间顶地址。
; Heap Configuration
; Heap Size (in Bytes)
;
Heap_Size EQU 0x200 ;声明栈的大小为0x200字节
AREA HEAP, NOINIT, READWRITE, ALIGN=3
__heap_base ;标号__heap_base,表示堆空间起始地址。
Heap_Mem SPACE Heap_Size ;开辟一段大小为Heap_Size的内存空间作为堆。
__heap_limit ;标号__heap_limit,表示堆空间结束地址。
;--------------------------------------------
;第一部分:
;启动代码最重要的工作是把异常中断向量表放到正确的Flash地址上
;把向量表定义为只读数据段,并导出向量表标号(Symbol),让链接器识别此标号并根据分散加载文件正确的放置向量表
;__Vectors标号需要与分散加载文件合起来看,才会明白其真正的功能
;--------------------------------------------
PRESERVE8 ;告诉编译器以8字节对齐。
THUMB ;告诉编译器使用THUMB指令集。
; Vector Table Mapped to Address 0 at Reset
AREA RESET, DATA, READONLY ;声明权限为“READONLY”的名称为“RESET”的数据段
;(假设STM32从FLASH启动,则此中断矢量表起始地址即为0x8000000)
EXPORT __Vectors ;将标号__Vectors声明为全局标号,这样外部文档就可以使用这个标号。
EXPORT __Vectors_End
EXPORT __Vectors_Size
;标号__Vectors,表示中断矢量表入口地址
;创建中断矢量表
;---------------------------------------
;第二部分:
;__initial_sp
; 1、栈顶指针地址,此语法跟MDK编译器的底层相关,是ARMCC编译器才能识别的语法
; GCC与IAR的底层编译器ICCARM编译器不能识别;
; 2、__initial_sp 是一个链接器Image Symbol;
; 3、此处__initial_sp相当于是顶地址,或者此处直接把顶地址写到此处也行(如:0x20004000);
; 4、__initial_sp具体是多少,在此种写法下,是由分散加载文件决定的,下文会有详细论述;
;
;Reset_Handler:
; 1、Reset_Handler函数地址,此处相当于把Reset_Handler函数地址赋值给PC,即调用Reset_Handler函数;
; 2、此处也可以是其他函数,只是把复位函数放于此处最符合实际应用场景。
; 重要关键节点:
; 1、绝大多数cortex-M微控制器(M0、M3、M4都是这样)复位后先进入厂商BOOTROM,此时所有用户行为均无法介入处理器;
; 2、厂商BOOTROM(有些厂商会有其他名称来称呼此功能) 主要负责处理一些芯片最初级初始化、
; 加密以及一些对MCU的差异化设置等工作:
; 3、BOOTROM顺利完成后,MCu控制权会交给用户,即启动代码;
; 4、启动代码(运行汇编语言则不需要此启动代码),最重要的工作在于设置MSP (主堆栈指针)以及PC(程序计数器)的值;
; 5、Cortex-M微控制器会默认把0x00000000地址里面的值设置为MSP的值,0x00000004地址里面的值设置为PC的值;
; 6、5中的默认地址可以通过修改Cortex-M中的VTOR寄存器来重新映射,比如改到0x20000000地址或其他;
;
;关于Exception(异常) 与Interrupt (中断) 的区别说明
; 1、Exception(异常)与Interrupt(中断)是不同的,是两个不同的概念,很多人会混淆两者,
; 把他们都按照中断来看待,这是错误的;
; 2、Exception(异常)是向量表的前16个向量,其优先级为负数,高于所有中断,而且不可调整优先级也不可关闭,
; 可以打断正常程序与Interrupt(中断) 的运行:
; 3、从第16个向量以后才是Interrupt(中断),可以设置优先级,不用时可以关闭,但优先级永远低于Exception(异常);
; 4、从这里大家就可以理解Pendsy Handler与svsTick Handler为什么会被用于嵌入式操作系统,
; 因为其优先级高于所有中断,可以确保操作系统拥有高于普通用户程序执行的超级权限,
; SVC_Handler有时也会用于操作系统,原理相同;
; 5、用户应用程序应尽量避免使用Exception(异常);
;---------------------------------------
__Vectors DCD __initial_sp ; Top of Stack 栈顶地址
DCD Reset_Handler ; Reset Handler 复位向量
DCD NMI_Handler ; NMI Handler
DCD HardFault_Handler ; Hard Fault Handler
DCD MemManage_Handler ; MPU Fault Handler
DCD BusFault_Handler ; Bus Fault Handler
DCD UsageFault_Handler ; Usage Fault Handler
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD SVC_Handler ; SVCall Handler
DCD DebugMon_Handler ; Debug Monitor Handler
DCD 0 ; Reserved
DCD PendSV_Handler ; PendSV Handler 操作系统会用到的异常向量
DCD SysTick_Handler ; SysTick Handler 操作系统会用到的心跳定时器异常向量(没有操作系统时可以用作普通定时器中断)
;---------------------------------------
;第三部分:
; 1、这里开始是中断向量表;
; 2、各个向量的顺序是芯片设计的时候就定义好的,不能更改;
;---------------------------------------
; External Interrupts
DCD WWDG_IRQHandler ; Window Watchdog
DCD PVD_IRQHandler ; PVD through EXTI Line detect
DCD TAMPER_IRQHandler ; Tamper
DCD RTC_IRQHandler ; RTC
DCD FLASH_IRQHandler ; Flash
DCD RCC_IRQHandler ; RCC
DCD EXTI0_IRQHandler ; EXTI Line 0
DCD EXTI1_IRQHandler ; EXTI Line 1
DCD EXTI2_IRQHandler ; EXTI Line 2
DCD EXTI3_IRQHandler ; EXTI Line 3
DCD EXTI4_IRQHandler ; EXTI Line 4
DCD DMA1_Channel1_IRQHandler ; DMA1 Channel 1
DCD DMA1_Channel2_IRQHandler ; DMA1 Channel 2
DCD DMA1_Channel3_IRQHandler ; DMA1 Channel 3
DCD DMA1_Channel4_IRQHandler ; DMA1 Channel 4
DCD DMA1_Channel5_IRQHandler ; DMA1 Channel 5
DCD DMA1_Channel6_IRQHandler ; DMA1 Channel 6
DCD DMA1_Channel7_IRQHandler ; DMA1 Channel 7
DCD ADC1_2_IRQHandler ; ADC1_2
DCD USB_HP_CAN1_TX_IRQHandler ; USB High Priority or CAN1 TX
DCD USB_LP_CAN1_RX0_IRQHandler ; USB Low Priority or CAN1 RX0
DCD CAN1_RX1_IRQHandler ; CAN1 RX1
DCD CAN1_SCE_IRQHandler ; CAN1 SCE
DCD EXTI9_5_IRQHandler ; EXTI Line 9..5
DCD TIM1_BRK_IRQHandler ; TIM1 Break
DCD TIM1_UP_IRQHandler ; TIM1 Update
DCD TIM1_TRG_COM_IRQHandler ; TIM1 Trigger and Commutation
DCD TIM1_CC_IRQHandler ; TIM1 Capture Compare
DCD TIM2_IRQHandler ; TIM2
DCD TIM3_IRQHandler ; TIM3
DCD 0 ; Reserved
DCD I2C1_EV_IRQHandler ; I2C1 Event
DCD I2C1_ER_IRQHandler ; I2C1 Error
DCD 0 ; Reserved
DCD 0 ; Reserved
DCD SPI1_IRQHandler ; SPI1
DCD 0 ; Reserved
DCD USART1_IRQHandler ; USART1
DCD USART2_IRQHandler ; USART2
DCD 0 ; Reserved
DCD EXTI15_10_IRQHandler ; EXTI Line 15..10
DCD RTC_Alarm_IRQHandler ; RTC Alarm through EXTI Line
DCD USBWakeUp_IRQHandler ; USB Wakeup from suspend
__Vectors_End
__Vectors_Size EQU __Vectors_End - __Vectors
;---------------------------------------
;第四部分:
;这部分开始可以称作Reset Handler实体,芯片上电后,经过BOOTROM后进入的用户可控最开始处的地方;
; 1、如果想让Mcu正常使用c语言,务必在此处调用 main函数;
; 2、__main() 不是main() 两者有着本质性的区别;
; 3、__main()是c Library中的函数,Kei1开发环境中自带的c Library中的函数;
; 4、main()是被 __main()调用的,__main()工作完成后最后一步就是调用main();
; 5、__main()被调用之前,可以根据需要插入一个或多个其他功能函数;
;---------------------------------------
AREA |.text|, CODE, READONLY ;定义只读的代码段
; Reset handler routine
;复位中断服务程序,PROC…ENDP结构表示程序的开始和结束。
Reset_Handler PROC
EXPORT Reset_Handler [WEAK] ;声明复位中断矢量Reset_Handler为全局属性
;这样外部文档就可以调用此复位中断服务。
IMPORT __main ;声明__main标号。
IMPORT SystemInit ;声明SystemInit标号。
LDR R0, =SystemInit ;跳转SystemInit地址执行
BLX R0
LDR R0, =__main ;跳转__main地址执行
BX R0
ENDP
; Dummy Exception Handlers (infinite loops which can be modified)
;---------------------------------------------------------------
;第五部分:
; 1、[weak]指定了一个这个函数为"弱函数”;
; 2、这些中断服务函教定义成弱函数的意义是,当中断出现时,需要有一个中断服务函数予以响应,但真实的
; 用户程序往往只会使用一部分中断,甚至不使用中断,所以以下这些函数给出了异常/中断服务函数的
; 默认实现,很简单,默认实现就是死循环汇编中的"B."语句,相当于while(1);因为不知道用户是否会
; 用到多少中断,但这些服务函数又很重要,所以就把这些函数都"实现"并声明为弱函数;
; 3、弱函数的意思是如果用户定义了同样名称的另一个函数,那么默认实现的弱函数就会被覆盖,比如
; HardFault_Handler异常在下面有一个默认的实现,但这种默认的实现不能满足我的需要的时候,我可以
; 再重新定义一个HardEault Handler函数这个新定义的HardFault_Handler函数会覆盖原有的被声明
; 为[WEAK]的弱函数;
; 4、有很多种适合使用弱函数的场合,默认的异常/中断服务函数只是一种应用场景;
; 5、在C语言中声明弱函数是在函数后加“__attribute((weak))”;
;----------------------------------------------------------------
NMI_Handler PROC
EXPORT NMI_Handler [WEAK]
B .
ENDP
HardFault_Handler\
PROC
EXPORT HardFault_Handler [WEAK]
B .
ENDP
MemManage_Handler\
PROC
EXPORT MemManage_Handler [WEAK]
B .
ENDP
BusFault_Handler\
PROC
EXPORT BusFault_Handler [WEAK]
B .
ENDP
UsageFault_Handler\
PROC
EXPORT UsageFault_Handler [WEAK]
B .
ENDP
SVC_Handler PROC
EXPORT SVC_Handler [WEAK]
B .
ENDP
DebugMon_Handler\
PROC
EXPORT DebugMon_Handler [WEAK]
B .
ENDP
PendSV_Handler PROC
EXPORT PendSV_Handler [WEAK]
B .
ENDP
SysTick_Handler PROC
EXPORT SysTick_Handler [WEAK]
B .
ENDP
Default_Handler PROC
EXPORT WWDG_IRQHandler [WEAK]
EXPORT PVD_IRQHandler [WEAK]
EXPORT TAMPER_IRQHandler [WEAK]
EXPORT RTC_IRQHandler [WEAK]
EXPORT FLASH_IRQHandler [WEAK]
EXPORT RCC_IRQHandler [WEAK]
EXPORT EXTI0_IRQHandler [WEAK]
EXPORT EXTI1_IRQHandler [WEAK]
EXPORT EXTI2_IRQHandler [WEAK]
EXPORT EXTI3_IRQHandler [WEAK]
EXPORT EXTI4_IRQHandler [WEAK]
EXPORT DMA1_Channel1_IRQHandler [WEAK]
EXPORT DMA1_Channel2_IRQHandler [WEAK]
EXPORT DMA1_Channel3_IRQHandler [WEAK]
EXPORT DMA1_Channel4_IRQHandler [WEAK]
EXPORT DMA1_Channel5_IRQHandler [WEAK]
EXPORT DMA1_Channel6_IRQHandler [WEAK]
EXPORT DMA1_Channel7_IRQHandler [WEAK]
EXPORT ADC1_2_IRQHandler [WEAK]
EXPORT USB_HP_CAN1_TX_IRQHandler [WEAK]
EXPORT USB_LP_CAN1_RX0_IRQHandler [WEAK]
EXPORT CAN1_RX1_IRQHandler [WEAK]
EXPORT CAN1_SCE_IRQHandler [WEAK]
EXPORT EXTI9_5_IRQHandler [WEAK]
EXPORT TIM1_BRK_IRQHandler [WEAK]
EXPORT TIM1_UP_IRQHandler [WEAK]
EXPORT TIM1_TRG_COM_IRQHandler [WEAK]
EXPORT TIM1_CC_IRQHandler [WEAK]
EXPORT TIM2_IRQHandler [WEAK]
EXPORT TIM3_IRQHandler [WEAK]
EXPORT I2C1_EV_IRQHandler [WEAK]
EXPORT I2C1_ER_IRQHandler [WEAK]
EXPORT SPI1_IRQHandler [WEAK]
EXPORT USART1_IRQHandler [WEAK]
EXPORT USART2_IRQHandler [WEAK]
EXPORT EXTI15_10_IRQHandler [WEAK]
EXPORT RTC_Alarm_IRQHandler [WEAK]
EXPORT USBWakeUp_IRQHandler [WEAK]
;---------------------------------------------------
;第六部分
; 这部分比较简单,看一下第五部分的代码就可以理解下面的部分;
;---------------------------------------------------
WWDG_IRQHandler
PVD_IRQHandler
TAMPER_IRQHandler
RTC_IRQHandler
FLASH_IRQHandler
RCC_IRQHandler
EXTI0_IRQHandler
EXTI1_IRQHandler
EXTI2_IRQHandler
EXTI3_IRQHandler
EXTI4_IRQHandler
DMA1_Channel1_IRQHandler
DMA1_Channel2_IRQHandler
DMA1_Channel3_IRQHandler
DMA1_Channel4_IRQHandler
DMA1_Channel5_IRQHandler
DMA1_Channel6_IRQHandler
DMA1_Channel7_IRQHandler
ADC1_2_IRQHandler
USB_HP_CAN1_TX_IRQHandler
USB_LP_CAN1_RX0_IRQHandler
CAN1_RX1_IRQHandler
CAN1_SCE_IRQHandler
EXTI9_5_IRQHandler
TIM1_BRK_IRQHandler
TIM1_UP_IRQHandler
TIM1_TRG_COM_IRQHandler
TIM1_CC_IRQHandler
TIM2_IRQHandler
TIM3_IRQHandler
I2C1_EV_IRQHandler
I2C1_ER_IRQHandler
SPI1_IRQHandler
USART1_IRQHandler
USART2_IRQHandler
EXTI15_10_IRQHandler
RTC_Alarm_IRQHandler
USBWakeUp_IRQHandler
B .
ENDP
ALIGN
;*******************************************************************************
; User Stack and Heap initialization
;*******************************************************************************
;IF…ELSE…ENDIF结构,判断是否使用DEF:__MICROLIB(此处为不使用)。
;若使用DEF:__MICROLIB,则将__initial_sp,__heap_base,__heap_limit
;亦即栈顶地址,堆始末地址赋予全局属性,使外部程序可以使用。
IF :DEF:__MICROLIB
EXPORT __initial_sp
EXPORT __heap_base
EXPORT __heap_limit
ELSE
IMPORT __use_two_region_memory ;定义全局标号__use_two_region_memory。
EXPORT __user_initial_stackheap ;声明全局标号__user_initial_stackheap,
;这样外程序也可调用此标号
__user_initial_stackheap ;标号__user_initial_stackheap,表示用户堆栈初始化程序入口
;分别保存栈顶指针和栈大小,堆始地址和堆大小至R0,R1,R2,R3寄存器。
LDR R0, = Heap_Mem
LDR R1, =(Stack_Mem + Stack_Size)
LDR R2, = (Heap_Mem + Heap_Size)
LDR R3, = Stack_Mem
BX LR
ALIGN
ENDIF
END;程序完毕
;************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE*****
部分解释
以上便是STM32的启动代码的完整解析,接下来对几个小地方做解释:
1、AREA指令:伪指令,用于定义代码段或数据段,后跟属性标号。其中比较重要的一个标号为“READONLY”或者“READWRITE”,其中“READONLY”表示该段为只读属性,联系到STM32的内部存储介质,可知具有只读属性的段保存于FLASH区,即0x8000000地址后。而“READONLY”表示该段为“可读写”属性,可知“可读写”段保存于SRAM区,即0x2000000地址后。由此可以从栈堆定义的代码知道,堆栈段位于SRAM空间。从AREA RESET, DATA, READONLY可知,中断矢量表放置于FLASH区,而这也是整片启动代码中最先被放进FLASH区的数据。因此可以得到一条重要的信息:0x8000000地址存放的是栈顶地址__initial_sp,0x8000004地址存放的是复位中断矢量Reset_Handler(STM32使用32位总线,因此存储空间为4字节对齐)。
2、 DCD指令:作用是开辟一段空间,其意义等价于C语言中的地址符“&”。因此从__Vectors行开始创建的中断矢量表则类似于使用C语言定义了一个指针数组,其每一个成员都是一个函数指针,分别指向各个中断服务函数。
3、 标号:前文多处使用了“标号”一词。标号主要用于表示一片内存空间的某个位置,等价于C语言中的“地址”概念。地址仅仅表示存储空间的一个位置,从C语言的角度来看,变量的地址,数组的地址或是函数的入口地址在本质上并无区别。
4、 IMPORT __main的__main标号并不表示C程序中的main函数入口地址,因此接下来的BX R0也并不是跳转至main函数开始执行C程序。__main标号表示C/C++标准实时库函数里的一个初始化子程序__main的入口地址。该程序的一个主要作用是初始化堆栈(对于程序清单一来说则是跳转__user_initial_stackheap标号进行初始化堆栈的),并初始化映像文档,最后跳转C程序中的main函数。这就解释了为何所有的C程序必须有一个main函数作为程序的起点——因为这是由C/C++标准实时库所规定的——并且不能更改,因为C/C++标准实时库并不对外界开发源代码。因此,实际上在用户可见的前提下,程序在BX R0后就跳转至.c文档中的main函数,开始执行C程序了。
至此可以总结一下STM32的启动文档和启动过程。首先对栈和堆的大小进行定义,并在代码区的起始处创建中断矢量表,其第一个表项是栈顶地址,第二个表项是复位中断服务入口地址。然后在复位中断服务程序中跳转C/C++标准实时库的__main函数,完成用户堆栈等的初始化后,跳转.c文档中的main函数开始执行C程序。
假设STM32被设置为从内部FLASH启动(这也是最常见的一种情况),中断矢量表起始地位为0x8000000,则栈顶地址存放于0x8000000处,而复位中断服务入口地址存放于0x8000004处。当STM32遇到复位信号后,则从0x80000004处取出复位中断服务入口地址,继而执行复位中断服务程序,然后跳转__main函数,最后进入mian函数,来到C的世界。
图片示意
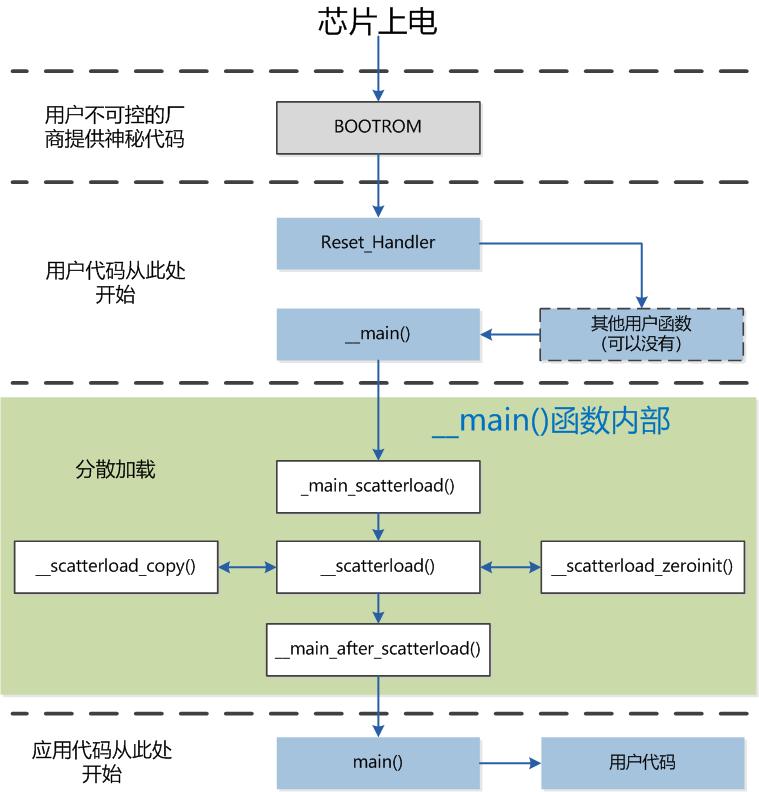
函数的调用过程:
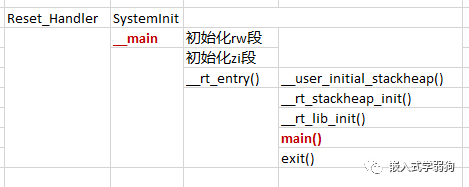
启动流程1(使用标准库,不使用Microlib)
如下图:
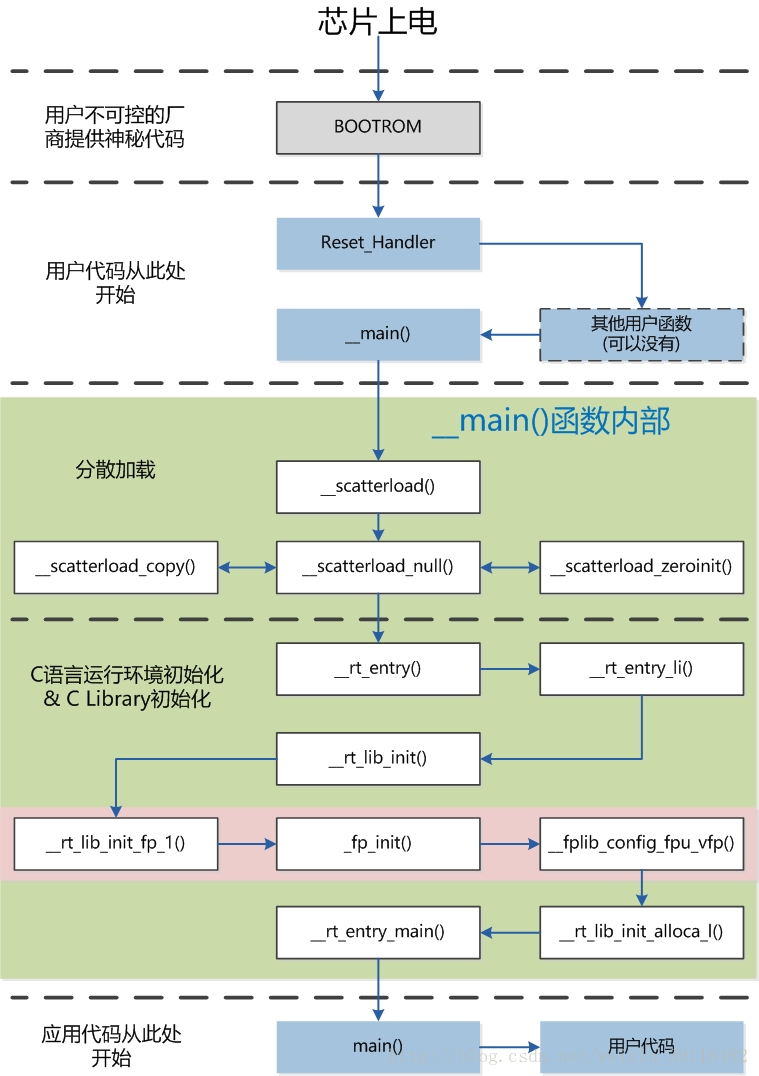
启动流程2(使用Microlib)
microlib 是缺省 C 库的备选库。它旨在与需要装入到极少量内存中的深层嵌入式应用程序配合使用。这些应用程序不在操作系统中运行。 microlib 进行了高度优化以使代码变得很小。它的功能比缺省 C 库少,并且根本不具备某些 ISOC 特性。某些库函数的运行速度也比较慢,例如, memcpy() 。 microlib与缺省C库之间的主要差异是: microlib不符合ISO C库标准。不支持某些ISO特性,并且其他特性具有的功能也较少; microlib不符合IEEE 754二进制浮点算法标准; microlib进行了高度优化以使代码变得很小; 无法对区域设置进行配置。缺省C区域设置是唯一可用的区域设置; 不能将main()声明为使用参数,并且不能返回内容; 不支持stdio,但未缓冲的stdin、stdout和stderr除外; microlib对C99函数提供有限的支持; microlib不支持操作系统函数; microlib不支持与位置无关的代码; microlib不提供互斥锁来防止非线程安全的代码; microlib不支持宽字符或多字节字符串; 与stdlib不同,microlib不支持可选择的单或双区内存模型。microlib只提供双区内存模型,即单独的堆栈和堆区。
启动流程如下图: